 我
我- 正确
- 错误
- 正确
- 错误
- 正确
- 错误
- 正确
- 错误
- 正确
- 错误
- 正确
- 错误
- A.间歇送进。
- B.制动。
- C.超越。
- D.抛物。
- 正确
- 错误
- A.剪刀机
- B.车床仿形机构。
- C.发电机。
- D.港口用的起重吊车。
- A.体积大。
- B.抗干扰性差。
- C.体积小。
- D.抗干扰性强。
- A.不能发生错误动作。
- B.非专业人员也可以正确使用。
- C.对医生提供有效的帮助。
- D.可以直接与人接触。
- A.大小。
- B.方向。
- C.时间。
- D.作用点。
- A.人可以不需要能量的活着。
- B.人们爬山需要耗能量,走路不需要耗能量。
- C.生活的人们时刻都在消耗能量。
- D.动物需要消耗能量,植物不需要消耗能量。
- A.对工作环境有很强适应能力,能代替人在有害场所从事危险工作。
- B.动作准确性高,可保证产品质量的稳定性。
- C.能高强度地在环境中从事单调重复的劳动。
- D.具有很广泛的通用性。
- A.感知能力。
- B.思维能力。
- C.行为能力。
- D.超能力。
- A.静止可靠。
- B.防止棘轮的反转。
- C.提高棘轮转度。
- D.减少噪声。
- A.美国科幻家艾萨克·阿西莫夫。
- B.乔治·德沃尔。
- C.意大利作家卡洛·洛伦齐尼。
- D.捷克剧作家卡尔·恰佩克。
- A.微电子技术。
- B.自动化控制技术。
- C.机械学。
- D.计算机。
- A.一条抛物线。
- B.一条直线。
- C.两条抛物线。
- D.两条双曲线。
- A.铜丝能导电。
- B.铝丝能导电
- C.银丝能导电
- D.以上都不正确。
- A.电机是发电机和电动机的统称。
- B.电机通常分为直流电机河北交流电机两大类。
- C.电机体积一定很小。
- D.交流电机分为异步电机和同步电机两类。
- A.立即向下运动
- B.仍将向上运动一小段时间。
- C.它只受重力作用。
- D.它除了受重力作用外,还受到向上的冲力。
- A.飞剪。
- B.足球。
- C.轮胎。
- D.键盘。
- A.齿面偏斜角小于齿面摩擦角。
- B.齿面偏斜角等于齿面摩擦角。
- C.齿面偏斜角大于齿面摩擦角。
- D.只要齿面偏斜角不等于齿面摩擦角。
- A.一个力。
- B.一组力。
- C.一个力偶。
- D.一个力和一个力偶。
- A.位移。
- B.导程。
- C.行程。
- D.升程。
- A.第一代机器人。
- B.第二代机器人。
- C.第三代机器人。
- D.第四代机器人。
- A.北京
- B.苏州
- C.广州
- D.天津
- A.二进制。
- B.八进制。
- C.十进制。
- D.十六进制。
- A.因为我们穿了鞋。
- B.因为我们与地面接触面存在摩擦力。
- C.因为陆地不会动。
- D.因为这是我们天生就有的能力。
- A.因为电线会掉下来砸到人。
- B.因为电线下的空气很差。
- C.因为靠近高压电线不能呼吸。
- D.因为人靠近高压电线可能会触电。
- A.中国北京
- B.美国纽约
- C.中国西安
- D.美国加州

- A.
- B.
- C.
- D.
- 37
-
下列描述正确的是?( )
- A.同一种材质在不同的状态下可以是导体,也可以是绝缘体。
- B.绝缘体在任何情况下都不可以转变为导体。
- C.导体在任何情况下都不可以转变为绝缘体。
- D.导体和绝缘体都是绝对的,不可转变。
- A.第一台潜水机器人。
- B.第一台飞行机器人。
- C.第一防水机器人。
- D.第一台移动机器人。
- A.110
- B.150
- C.200
- D.220
- A.由美国机器人专家提出。
- B.人类不喜欢机器人。
- C.机器人不喜欢人类。
- D.随着机器人的拟人程度增加,人类对它的好感度就会改变。
- A.盘形凸轮。
- B.移动凸轮。
- C.圆柱凸轮。
- D.圆锥凸轮。
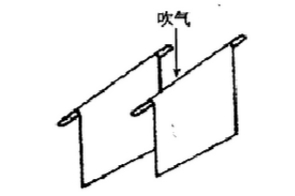
- A.无任何反应。
- B.两张纸往里合。
- C.两张纸往外张。
- D.一直纸往里合,一张纸往外张。
- A.德国
- B.美国
- C.英国
- D.日本
- A.物体的速度不断增大,表示物体必定受力。
- B.物体的位移不断增大,表示物体必定受力作用。
- C.物体朝什么方向运动,则这个方向上物体必定受力。
- D.物体的速度大小不变,则物体必定不受力作用。
- A.唐朝。
- B.内清朝后期。
- C.解放后。
- D.西周时期。
- 46
-
下面说法正确的是?( )
- A.力是改变物体运动状态的原因。
- B.力是维持物体平衡状态的原因。
- C.力是改变物体位置的原因。
- D.力是物体产生速度的原因。
- A.工作空间。
- B.最大空间。
- C.自由度。
- D.危险空间。
- A.有时需要人为干预。
- B.有时不需要人干预。
- C.有时需要两个机器人配合。
- D.以上说法都正确。
- A.1992
- B.1995
- C.1997
- D.1999
- A.富兰克林
- B.伽利略
- C.牛顿
- D.喜羊羊



