 我
我- A.车令与凸轮轴位置不一致
- B.必须停油
- C.主机转速已下降到换向转速
- D.有应急操作指令
- A.两处手柄都在停车位置
- B.两处手柄在同一方向即可
- C.两处手柄在同一方向,且设定转速相等
- D.两处手柄非同一方向,且设定转速相等
- A.力平衡,负反馈
- B.力矩平衡,负反馈
- C.位移平衡,正反馈
- D.力矩平衡,正反馈
- A.Ⅰ+Ⅲ+Ⅳ+Ⅴ
- B.Ⅰ+Ⅱ+Ⅲ+Ⅳ
- C.Ⅱ+Ⅲ+Ⅳ+Ⅵ
- D.Ⅱ+Ⅲ+Ⅴ+Ⅵ
- A.控制电磁阀通电,控制活塞处下位
- B.控制电磁阀通电,控制活塞处上位
- C.控制电磁阀断电,控制活塞处下位
- D.控制电磁阀断电,控制活塞处上位
- 6
-
对于采用EPC-400控制的FOPX型分油机自动控制系统,执行一次分油任务的正确操作顺序是______。Ⅰ、启动分油机马达Ⅱ、启动加热器Ⅲ、检查燃/滑油油路Ⅳ、启动油泵Ⅴ、启动EPC-400控制程序
- A.Ⅰ→Ⅱ→Ⅲ→Ⅳ→Ⅴ
- B.Ⅲ→Ⅳ→Ⅰ→Ⅱ→Ⅴ
- C.Ⅲ→Ⅳ→Ⅰ→Ⅴ→Ⅱ
- D.Ⅲ→Ⅱ→Ⅰ→Ⅳ→Ⅴ
- A.火焰监视器故障
- B.点火电极结炭严重
- C.时序控制器故障
- D.进油电磁阀未打开
- A.补偿水电磁阀断续通电,操作水电磁阀断电
- B.补偿水电磁阀断电,操作水电磁阀断续通电
- C.补偿水电磁阀通电,操作水电磁阀通电
- D.补偿水电磁阀断电,操作水电磁阀断电
- A.时序过程重新开始
- B.报警、扫风结束自动停炉
- C.扫风结束自动停炉
- D.自动停炉
- A.预点火
- B.同步电机SM停转,开大风门
- C.同步电机SM停转,关小风门
- D.同步电机SM转动,关小风门
- A.给水阀故障
- B.蒸汽流量测量变送器故障
- C.水位测量变送器故障
- D.给水泵故障
- A.立即发出报警,自动停炉
- B.达到高压保护值时,发出报警,不停炉
- C.进行高火燃烧
- D.达到高压保护值时,发出报警,自动停炉
- A.锅炉满水
- B.锅炉失水
- C.锅炉失水不能停炉
- D.始终发失水报警,不能起动锅炉
- A.Ⅰ+Ⅲ+Ⅴ
- B.Ⅱ+Ⅲ+Ⅳ
- C.Ⅱ+Ⅳ+Ⅴ
- D.Ⅳ+Ⅴ+Ⅵ
- A.处在“OFF”位置
- B.处在“DO”位置
- C.处在“HFO”位置
- D.与选择开关的状态无关
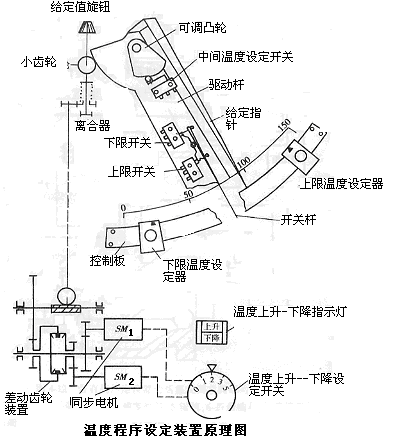
- A.温度上升-下降设定开关位置
- B.上限温度设定开关位置
- C.下限温度设定开关位置
- D.可调凸轮位置
- A.一直对重油进行温度上限值的定值控制
- B.一直对柴油进行温度上限值的定值控制
- C.重油粘度不断升高
- D.重油粘度不断降低
- A.调节阀动作的起始压力
- B.调节阀的初始阀门开度
- C.冷却水温度的给定值
- D.WALTON恒温阀的比例带
- A.油温下限升高
- B.油温上限降低
- C.柴油-重油转换温度降低
- D.柴油-重油转换温度升高
- A.积分时间Td↓
- B.微分时间Td↑
- C.比例带PB↓
- D.比例带PB↑
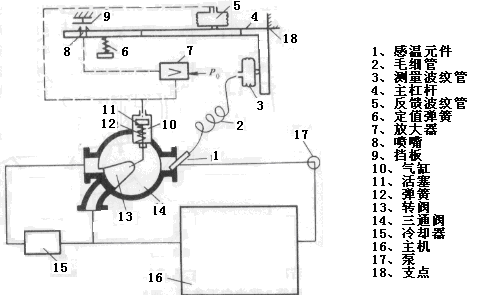
- A.金属丝热电阻
- B.热敏电阻
- C.感温盒
- D.温包
- A.给定值太高,应调定值弹簧
- B.比例带太小,应左移反馈波纹管
- C.积分时间太短,应关小积分阀
- D.测量力矩太大,应上移测量波纹管
- A.PB大一些,Ti小一些
- B.PB大一些,Ti大一些
- C.PB小一些,Ti小一些
- D.PB小一些,Ti大一些
- A.反作用式
- B.正作用式
- C.气开式
- D.气关式
- A.保持原来值不变
- B.下降到下限值以下
- C.上升到上限值以上
- D.激烈振荡
- A.逆时针转动比例带调整杆,关小积分阀
- B.逆时针转动比例带调整杆,开大积分阀
- C.顺时针转动比例带调整杆,关小积分阀
- D.顺时针转动比例带调整杆,开大积分阀
- A.比较环节是按力矩平衡原理工作的
- B.PB调整靠节流分压器
- C.全开微分阀可实现PI作用规律
- D.全开积分阀可实现PD作用规律
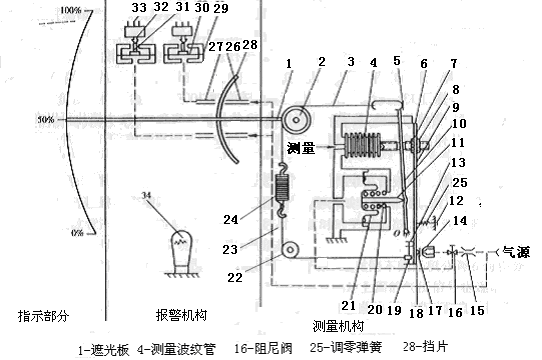
- A.上移测量波纹管
- B.开大阻尼阀
- C.关小阻尼阀
- D.扭紧调零弹簧
- A.拉长下面的挡片
- B.缩短下面的挡片
- C.拉长上面的挡片
- D.缩短上面的挡片
- A.迁移后量程起点改变
- B.迁移后量程终点不变
- C.迁移后量程终点改变
- D.迁移后量程不变
- A.先开截止阀,后开平衡阀
- B.先开平衡阀,后开截止阀
- C.先开平衡阀,后开冲洗阀
- D.先开冲洗阀,后开平衡阀
- A.喷嘴背压
- B.挡板开度
- C.比较环节的输入
- D.反馈环节的输出
- A.上移反馈波纹管
- B.下移反馈波纹管
- C.调节调零弹簧,使挡板离开喷嘴
- D.调节调零弹簧,使挡板靠近喷嘴
- A.自诊断
- B.输入用户程序
- C.读入现场信号
- D.输出结果
- A.Ⅰ+Ⅱ+Ⅴ+Ⅵ
- B.Ⅱ+Ⅲ+Ⅴ+Ⅵ
- C.Ⅰ+Ⅱ+Ⅲ+Ⅴ
- D.Ⅱ+Ⅳ+Ⅴ+Ⅵ
- A.0.08
- B.0.06
- C.0.04
- D.0.02
- A.能存贮用户程序
- B.速度匹配
- C.电平和功率的匹配
- D.能为CPU提供外部设备的状态
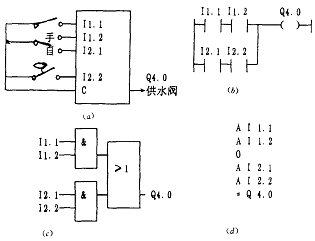
- A.(a)
- B.(b)
- C.(c)
- D.(d)
- A.A
- B.B
- C.C
- D.D
- A.ROM
- B.PROM
- C.EPR0M
- D.EEPR0M
- A.非周期过程
- B.振荡趋势增强
- C.较大静差
- D.稳定性增强
- A.振荡激烈
- B.静态精度高
- C.过渡过程时间短
- D.容易受到外部干扰的影响
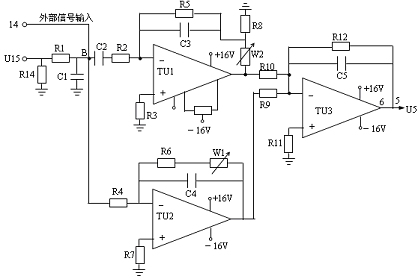
- A.比例调节器
- B.PD调节器
- C.PI调节器
- D.PID调节器
- A.R1的比例、积分、微分作用都比R2强
- B.R1的比例、积分、微分作用都比R2弱
- C.R1的比例、积分作用比R2弱,微分作用比R2强
- D.R1的比例、积分作用比R2强,微分作用比R2弱
- A.压力设定值太大
- B.压力设定值太小
- C.幅差值太大
- D.幅差值太小
- A.对被控量进行连续控制
- B.稳态时静态偏差较大
- C.按偏差的大小和方向控制
- D.按被控量的上、下限值控制
- A.比例规律输出
- B.指数曲线规律输出
- C.“S”型曲线规律输出
- D.积分规律输出
- A.稳定性好
- B.稳定性差
- C.静态偏差大
- D.动态精度高
- A.τ大,K小
- B.T小,τ小
- C.T小,K大
- D.T大,K大
- A.保持不变
- B.达到最大值
- C.达到最小值
- D.不能自动控制



